
Description
Now Shipping the Newest 5.1! NOW WITH SUPER CLEAN , NO NOISE BEC ! To Supply the clean Gyro with no noise power lines , with easier PPM/S_sub selector , and improved internal layout and the BEC now has the options to NOT be installed on the board if you plan to power via 5 volts. This will keep the board in the most optimal condition. Check options . NOTE: S-bus is built in default selected. If you want to use PPM. you need to CUT the track, then bridge the PPM pad, even the Sbus pads do not look “bridged” with solder. they are connected inside the board, no bridging is needed for a super clean look. Only place to get the freshest & NEWEST Genuine OMNIBUS that each portion of the sales goes to back to the BF project. only place with correct documentations included with the board, and Pin headers in the bag if needed! OMNIBUS F4 V3 header through-hole is connected to UART6, not UART1 like all others. DSMX receiver is UART1 !
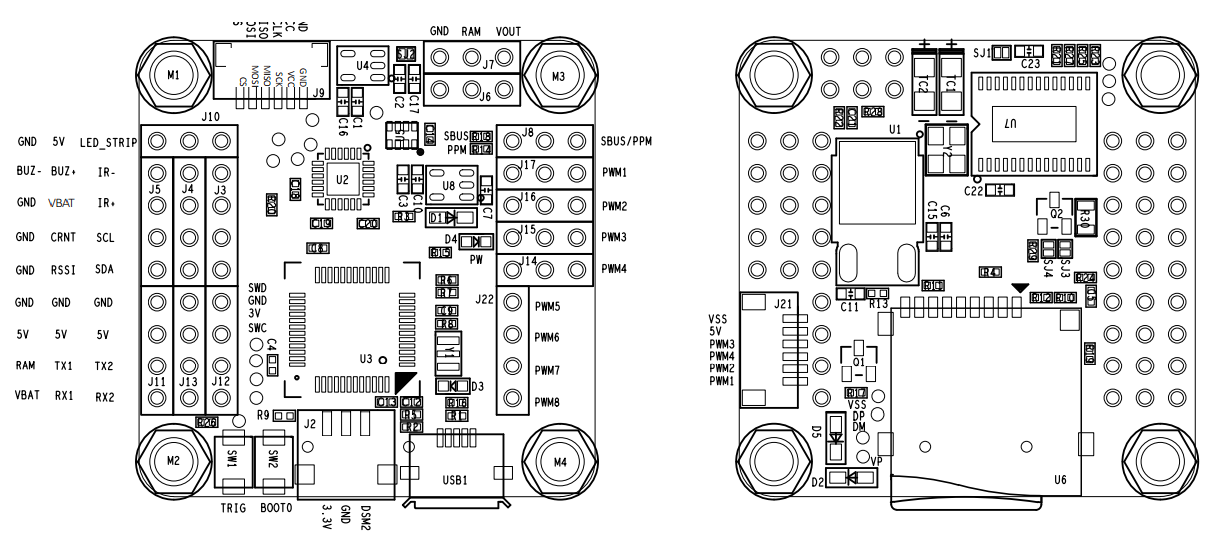
Flip32 Omnibus was designed a 36mmx36mm (30.5mm mount holes) community version of his AIO boards. It’s called Flip32 OMNIBUS and it’s outstanding. The great thing is that the board is based on what the community really wanted and it allows a very clean build by providing pin holes for almost every connection. You can power it directly from your battery by using BAT/GND pins. The following list some of the components included:
- STM32 F403 MCU (Spi connected to Gyro)
- Firmware hex = OMNIBUSF4SD hex from dropdown.
- MPU6000 (the 6 axis SPI Gyrometer + Accelerometer)
- Smartaudio capable VTX PID Programming
- D- Shot Supported (no Modification)
- OSD (configured over Betaflight UI)
- SD CARD READER + And BARO OPTION ADDED in V3
- SBUS/PPM + DSMX Ports
- current + voltage + rssi + buzzer as pins
- SmartAudio V2 via J10
- 4x 3 pin holes for ESCs + 4x signal pin holes
- IR pins for lap timing transponder
Now with SD card reader and Baro The Omnibus F4 V2 has the F4 processor, built-in SD card Reader, built-in OSD, video filtering, Baro, and LDO. Supports D-Shot out of the box with no Modification. Tuning could not be easier with the help of the black box and tuning via transmitter in the OSD. It is now possible to connect your Smartaudio capable VTX The Flip32 Omnibus flight controller uses the MPU6000 over SPI for the best possible flight performance. Along with the MPU6000 are a and an AB7456 OSD chip (an upgraded MAX7456) for the BetaFlight integrated OSD. You won’t need a PDB with this build because there is a high performance 5v, 1.5a STMicrocontroller L78 voltage regulator, so you can plug the flight battery right into the flight controller.The Flip32 Omnibus flight controller the first F4 flight controller with a MAX7456 OSD chip directly connected to the flight controller, so it can be configured from the BetaFlight configurator. The Omnibus F4 features the STM32F405 F4 processor, built-in BetaFlight OSD, video filtering, microsd blackbox, and BMP280 Barometer. MPU6000 Low noise Gyro, in most cases soft mounted is not necessary, and is more accurate when attached to the frame. If you do see any symptoms, we high recommend to soft mount the motors first.
The SmartAudio support has been included in BF3.1.0! (SmartAudio V2 VTX Control)-it is now possible to connect your Smartaudio capable VTX. OMNIBUS F4 SD) – Connect RSSI wire to RSSI input on J4. [BF] Working IR Transponder. This feature was included in the BF3.1.0 . [BF] Fully configurable software serial” – maximum flexibility of configuring software serial ports.
INSTALL THE BETAFLIGHT CONFIGURATOR
NEW OSD tab in Betaflight configurator lets you setup and configure OSD settings on the fly!
This flight controller requires BetaFlight 3.1 & Betaflight configurator to take full advantage of the OSD. With a stock OMNIBUSF4, you have a pair of pins you can assign to the software serial port; PWM5 and PWM6. PWM5 may be used for LED strip on your build,If you can solder a pad, then you have three more pins you can use to configure the software serial port. Refer to OMNIBUS F4 Series / Flip F4: Accessing CH2,5&6 on how to do this.There is one more hidden port that you may be able to utilize; the PPM pad. This pad will become available if you are NOT using PPM, of course.
The Flip 32 OmnibusF4 flight controller is an integrated flight controller and OSD specifically designed for ease of use and outstanding flight performance. The MPU6000 inertial motion sensor was chosen for it’s high reliability, accuracy and update speed. This board has no problem running fast loop times and ESC protocols. There is an onboard for altitude sensing along with an On Screen Display (OSD) chip directly connected to the main processor (MCU). This tight integration between the MCU and the OSD enables fast updates to the display and easy configuration of the OSD, which is managed straight from the BetaFlight configuration tool. You no longer need to worry about the extra hassle of configuring your OSD with a USB/UART adapter and 3rd party configuration tool, it’s all built into the flight control software.
The Flip 32 OmnibusF4 was designed to work specifically with BorisB’s amazing BetaFlight firmware. Boris is a control system expert and has implemented his own “ISA-PID compensator” based PID controller, called the BetaFlight PIDc, that gives an almost-predictive control for that super locked-in stick feeling. Download the BetaFlight configurator to flash and configure your quadcopter here: https://chrome.google.com/webstore/detail/betaflight-configurator/kdaghagfopacdngbohiknlhcocjccjao
Finally, for maximum ease of use, the Flip 32 OmnibusF4 has an onboard voltage regulator that can easily handle up to a 5s battery. No need to mess with a PDB, just plug your battery straight into the flight controller and you’re ready to go! Along with the robustly engineered power management system on the OmnibusF4, special precautions have been taken to ensure that the sensitive OSD chip is well protected, so you don’t have to worry about any problems with your OSD. even on 5s!
To power the board you have two options. Either connect battery directly to BAT/GND or supply 5V on one of the ESCs connections. However you obviously want to have voltage display in your OSD so just connect BAT/GND to your LiPo (up to 4S).
To power your VTX and camera you have even more options. Out of the box RAM is not connected to anything. That leaves you with following alternatives.
Short RAM and VBAT to get LiPo voltage. This would be unfiltered and could cause video noise.
Short RAM and 5V to get filtered 5V from the board. This would provide clean video but 5V is probably not enought for most VTX on the market.
Provide clean voltage from external BEC . It will provide filtered 10V for HS1177 and a VTX.
Updated:SBUS/PPM Pin – Pin define changed since Betaflight v3.1 , we use SBUS pin to read PPM input too. This can be changed Via the GUI. These are setup for SBus or PPM pin out of the box
Driver Help: Also try the ImpulseRC_Driver_Fixer if you are having some problems .
| Name | RTFQ | BF target |Status| Key features |
| OMNIBUS AIO F3 | FLIP32-F3-OMNIBUS V2 | OMNIBUS | CUR | F3 |
| OMNIBUS AIO F3 PRO | FLIP32-F3-OMNIBUS PRO | OMNIBUS | CUR | F3 + PRO feature set (*1) |
+———————-+—————————-+————-+——+——————————-+—-
| OMNIBUS AIO F4 | FLIP32-F4-OMNIBUS | OMNIBUSF4 | CUR | F4 |
| OMNIBUS AIO F4 V2 | FLIP32-F4-OMNIBUS V2 | OMNIBUSF4SD | CUR | F4 + SD |
| OMNIBUS F4 Pro | FLIP32-F4-OMNIBUS V2 PRO | OMNIBUSF4SD | CUR | F4 V2 + PRO feature set (*1) | +———————+—————————-+————-+——+——————————-+–
| OMNIBUS AIO F3 MINI | FLIP32-F3-OMNIBUS V2 MICRO | OMNIBUS | CUR | Mini – OSD | |
| OMNIBUS AIO F4 MINI | FLIP32-F3-OMNIBUS V2 MICRO | OMNIBUSF4 | CUR | F4 – Mini | |
The Flip32 Omnibus flight controller uses the MPU6000 over SPI for the best possible flight performance. Along with the MPU6000 are a and an AB7456 OSD chip (an upgraded MAX7456) for the BetaFlight integrated OSD. You won’t need a PDB with this build because there is a high performance 5v, 1.5a STMicrocontroller L78 voltage regulator, so you can plug the flight battery right into the flight controller.The Flip32 Omnibus flight controller the first F4 Flight controller with a MAX7456 OSD chip directly connected to the flight controller, so it can be configured from the BetaFlight configurator. A new generation AIO Flight control for FPV. Based on the F403 MCU and uses F4 MCU controls for OSD over SPI bus in DMA mode.
The Flip 32 OmnibusF4 flight controller is an integrated flight controller and OSD specifically designed for ease of use and outstanding flight performance. The MPU6000 inertial motion sensor was chosen for it’s high reliability, accuracy and update speed. This board has no problem running fast loop times and ESC protocols. There is an onboard for altitude sensing along with an On Screen Display (OSD) chip directly connected to the main processor (MCU). This tight integration between the MCU and the OSD enables fast updates to the display and easy configuration of the OSD, which is managed straight from the BetaFlight configuration tool. You no longer need to worry about the extra hassle of configuring your OSD with a USB/UART adapter and 3rd party configuration tool, it’s all built into the flight control software.
The Flip 32 OmnibusF4 was designed to work specifically with BorisB’s amazing BetaFlight firmware. Boris is a control system expert and has implemented his own “ISA-PID compensator” based PID controller, called the BetaFlight PIDc, that gives an almost-predictive control for that super locked-in stick feeling. Download the BetaFlight configurator to flash and configure your quadcopter here: https://chrome.google.com/webstore/detail/betaflight-configurator/kdaghagfopacdngbohiknlhcocjccjao
Finally, for maximum ease of use, the Flip 32 OmnibusF4 has an onboard voltage regulator that can easily handle up to a 5s battery. No need to mess with a PDB, just plug your battery straight into the flight controller and you’re ready to go! Along with the robustly engineered power management system on the OmnibusF4, special precautions have been taken to ensure that the sensitive OSD chip is well protected, so you don’t have to worry about any problems with your OSD. even on 5s!
Specifications
- STM32 F403 MCU, Runs Betaflight 3.1 firmware
- SBUS/PPM input (Pinheaders)
- 8PWM output (1-4Pinheaders and Sh1.0 Plug, 5-6 as Pinheaders)
- Only 36x36mm, mount holes 30.5×30.5mm
- SD card Black box
- IR Pins for race timing transponder
- SPI Sensor MPU6000
- SD Flash memory
2-4S Lipo Direct power
Power
To power the board you have two options. Either connect battery directly to BAT/GND or supply 5V on one of the ESCs connections. However you obviously want to have voltage display in your OSD so just connect BAT/GND to your LiPo (up to 4S).
To power your VTX and camera you have even more options. Out of the box RAM is not connected to anything. That leaves you with following alternatives.
1.Short RAM and VBAT to get LiPo voltage. This would be unfiltered and could cause video noise.
2. Short RAM and 5V to get filtered 5V from the board. This would provide clean video but 5V is probably enough for most VTX on the market.
BetaFlight Download
This board works best with BetaFlight software, which has a focus on flight performance but is still relatively similar to cleanflight. The GUI is a chrome app which can be downloaded here
This guide will not cover the fundamentals of using betaflight as that can be found in the official Betaflight Wiki
To update the firmware within betaflight you simply need to select the target to be OMNIBUS, more details on using DFU mode for flashing the firmware is detailed later in this guide
{kind=link}
The Omnibus F4 has a 3 position jumper (next to UART1 pins) that is used to select the power source for the board. You can either power it like most other flight controllers, via a 5V supply. Alternatively you can power it directly via your battery supply (up to 4S Lipo only, usualy 12V or 14V).
see picture( Powering via Lipo Powering via 5V on ESC rail
Flashing firmware and Zadig Drivers
In order to select the Omnibus target within betaflight you might need to select the option to show unstable releases if the omnibus is not shown on the target list for now. And you will also need to flash in DFU mode which is discussed below.
If using windows 10, you will need to flash the board in DFU mode, and to do this you will need to use a program called Zadig which is used to install generic USB drivers so you can talk to the board. You can download Zadig here
Once installed, open Zadig and select the STM32 Bootloader, and WinUSB as the driver to install the correct driver for the board as shown below
Configuring the OSD
One of the best things about the Betaflight GUI, is the ability to configure your OSD board directly within the software. Now you dont need to care about messing around with MW OSD GUI. Also what is even better is that the latest OSD firmware is included with each betaflight update so you dont need to use arduino IDE anymore to flash new OSD firmware.USB DRIVER
This board will be officially supported in Betaflight 3.1.0. Currently it comes with a custom Betaflight version, provided by RTFQ. Use the following releases.
To flash the firmware you have to enter the so called DFU mode. On Windows 10 I had to use a tool called Zadig (download and start it) to be able to switch drivers for DFU mode to work. In order to switch drivers you have to take the following steps.
ZADIG I ZADIG II
Push BOOT button on the flight controller.
Plug-in the USB cable (the red LED should not be as bright as normally).
Fire up Zadig and hit “Options” and then “List All Devices”.
From the list choose “STM32 BOOTLOADER”.
Under “Driver” choose “WinUSB” on the right and hit “Reinstall Driver”.
Close Zadig, disconnect the flight controller, close all Google Chrome instances.
BETAFLIGHT
Betaflight now has its own UI so don’t use the Cleanflight configurator anymore.
In order to flash Betaflight you have to press the BOOT button and connect the flight controller via USB. You should be able to see “DFU” instead of COM ports in the pull down menu now. The steps to flash a hex file are now straightforward.
BFL
Hit “Load Firmware”.
Choose the hex file.
Hit “Flash Firmware”.
Watch the Betaflight UI flashing your swifty flight controller.
OSD
BFL II
One of the most convenient features of this board is setting up OSD via Betaflight. Just forget about MW OSD or MW OSD GUI. Newest OSD releases will be included in the Betaflight firmware so you don’t have to worry about getting newest ScarabOSD from GitHub and compiling and uploading it with the Arduino development environment to the board.
The Omnibus flight controller uses the MPU6000 over SPI for the best possible flight performance. If you haven’t already seen it, you should checkout Josh’s awesome video on different IMUs. Along with the MPU6000 are a and an AB7456 OSD chip (an upgraded MAX7456) for the BetaFlight integrated OSD.
The Omnibus has an SD Card Reader Flash memory for blackbox logging and uses the much faster VCP USB link, so it takes minutes instead of hours to copy your blackbox logs off the flight controller.
Accessable pins
| LABEL | PIN | TIMER | DMA | LQFP64 PIN | NOTE |
|---|---|---|---|---|---|
| RSSI | A0 | 14 | Not ADC capable | ||
| PWM5 | A1 | 5,2 | 1,4 | 15 | SoftSer 11 RX(/TX) |
| PWM4 | A2 | 2,3 | 1,1 | 16 | Motor 4 |
| PWM3 | A3 | 2,4 | 1,6 | 17 | Motor 3 |
| PWM6 | A8 | 1,1 | 2,3 | 41 | SoftSer 11 TX(/RX) |
| UART1 TX | A9 | 1,2 | 2,2 | 42 | |
| UART1 RX | A10 | 1,3 | ?,? | 43 | DSM2 SPEKSAT |
| PWM1 | B0 | 3,3 | 1,7 | 26 | Motor 1 |
| PWM2 | B1 | 3,4 | 1,2 | 27 | Motor 2 |
| Buzzer | B4 | 56 | |||
| LED_STRIP | B6 | 4,1 |
Reviews (0)Be the first to review “”You must be logged in to post a review. Related products
|
Reviews
There are no reviews yet.