
Flip32 F4 (Revo Pin Header edition) V2
$17.00
Description
*All unites now flashed with BetaFlight 3.1.7 and have support for D-shot ready to select from the Dropdown! D-shot Ready!
NOW SHIPPING V2! S-Bus and PPM on individual pins to make use of more Uarts , Improved BEC circuity,added copper, easier Inav support, and more….
Tons of features in one board with a wounder full layout. Flip F4 ; Flip32 F4 With the low noise Gyro, optimal gyro placement recommended , and not an overly super inventive gyro that will require chasing down the PID tune, Hard mounting in most cases will not hurt performance. A small portions of sales go back to the beta flight program to keep on pushing more features forward.
- -Uses the cc3d revolution Target vanilla default. -updated instantaneously with new releases.
- Stable SPI MPU-6000 Gyro
- D- Shot support and Flashed with D-ready firmware
- All through hole pin header Design -no Sh connectors
- direct Lipo input :1.5A Built-in onboard regulator – NO BEC needed. connect direct to a Lipo to power the board and Rx.
- RaceFlight or Betaflight support on an STM32 F3 with a SPI based MPU6000 gyro – low noise gyro will not force one to soft-mount the fc
- Boot – DFU button . ready to be Pressed
- Blackbox support – Max 16mb for data logging
- SBUS/PPM input (Pinheaders) . 6PWM output (Pinheaders)
- Spektrum satellite port for direct connection – setup radio via USB power, woot woot!
- STM32 F405 MCU
- LED strip Port
- Buzzer Port (v2 buzzer port. working great in BF)
- Flashed tested and Ready to Fly after setup
- Only 36x36mm, mount holes 30.5×30.5mm
- UART1 has three input: 1. DSM2 socket, it is no inverter, 2.pinheaders called UART TX RX, it is no inverter 3. Pinheaders called SBUS, it has inverter
Works Perfect with RACEFLIGHT – PRE LOADED WITH RACEFIGHT.
Download firmware here : http://raceflight.net/beta/REVO_BB330_FULL.bin
Newest Latest RaceFlight Configurator ( do not use one from chome web store, it is out of date : http://raceflight.net/rfc/cfgrf.crx
*here Boards are shipped BetaFlight with buzzer fixed, Buzzer is working out of the box from default port*
*RaceFlight please connect Buzzer to labeled “RSSI” port. These port are swapped in the firmware, but are working . Buzzer should be connected to Rssi Port, no code changed need, the printing on the board from the RF and BF are not the same.
RaceFlight has the standard modes, Arm, Angle, Horizon, Beeper, and Failsafe. There are other modes though that really help drive performance. Some modes have sweet names like Skitzo and BrainDrain (yes these modes are named after the pilots). There are also modes that are named for what they are. Below is a full list of modes minus the standards modes already mentioned.
Pro Smooth modes, BrainDrain, Skitzo, Landing, Delete Flash, LED On, LED Change Program, LED Change Color, BlackBox
some of the modes are self explanatory, like Delete Flash, BlackBox, Landing, etc. We’re going to focus on the 3 modes that help drive performance; Pro Smooth mode, BrainDrain mode, and Skitzo mode.
Skitzo Mode – Skitzo mode is unique. It essentially increases the resolution of your stick inputs into the flight controller. With Skitzo mode enabled, this resolution increase is supposed to be unlimited. This translates to smoother flight in air and allows you to make finer in flight adjustments. Leave it on all the time, it feels amazing!
BrainDrain Mode – BrainDrain mode gives you a sharper stick feel. This isn’t the same as resolutions though. This translates more towards your rates responsiveness. It’s really good for racing when you need that super sharp stick feel on the sharp 180s for example. Having this enabled is great, but it may require some additional tuning. This is because with the sharpness increase, prop-wash can be more noticeable.
Pro Smooth Mode – Pro smooth mode smooths your transitions. It’s most useful when you’re trying to get that absolutely stunning video of your freestyle flight. When you make stick transitions, pro smooth literally smooths them out so they’re not as jerky. You can really notice it when watching the HD video as it just makes things look smooth. You can use this in case you’re not as smooth on the sticks as Skitzo.
RaceFlight also has some cool built in witchcraftfeatures that you can take advantage of and tweak! One such feature is called “witchcraft.” Witchcraft smooths Kd over time. Kd is Derivative in your PID controller. This helps take care of bad data and smooths the data over the course of tiny milliseconds. It comes set to a default of 16 right now, but 32 is a good number to get you started It’s something you can play and tweak to your liking.
Raceflight is a latest flight controller firmware. By taking advantage of the processing power of F4 flight controllers, it’s able to run at 8kHz and brings the looptime down to 125 (uS). MultiShot ESC protocol which is 10 times faster than Oneshot125, 80 times faster than standard PWM signal
Works Perfect with RACEFLIGHT – PRE LOADED WITH RACEFIGHT Or BetaFlight 3.0!
Uses the same target and feature of the CC3D OpenPilot revolution but with more feature.
~ The OpenPilot Revolution board, also called ‘Revo’, is a new breed of Autopilot using the STM32F4 series, 210MIPS ARM Micro-controller. It contains a hardware floating point unit (FPU)which is a huge advancement for hobby-class autopilots. OpenPilot has been 32bit since day one, and the FPU is another step up the performance ladder. The FPU allows precise, low-latency processing of real-life measurements using advanced attitude estimation algorithms.
The Revolution is a flight control computer with autopilot, intended for multirotors, helicopters and fixed wings. It is a 6DOF with gyroscope/accelerometer only, no magnetometer and no pressure sensors and no radio link.
-Flexi-IO Port: JST-SH 10-pin. The receiver port can act as an input or output port depending on the configuration which is set in the Hardware Settings. Configuring the receiver port as an output port allows the user to assign more output channels then the 6 standard servo outputs.
-MainPort: JST-SH 4-pin. This is a serial USART whose baud rate can be adjusted through the GCS. Optionally, Futaba S.Bus receiver, Spektrum/JR satellite receiver or GPS can be mapped to the MainPort. Default configuration is Telemetry for connecting an RF modem.
-FlexiPort: JST-SH 4-pin. The function of this port also depends on the configuration and can be configured for I2C or Serial. The default configuration doesn’t use this port, but it can be used for Telemetry, GPS, Spektrum satellite receivers (all working), and other I2C peripherals (under development).
-RF Socket: Antenna connection socket for on-board OPLink modem.
-Pwr Sen/Sonar Port: JST-SH 4-pin. This port can be configured to accommodate an Autopilot current sensor and a low cost Sonar sensor such as the HC-SR04. It can also be used as a general purpose input/output port or as a one or two channel analog input port.
Is a new generation of Flight Controller which uses the series STM32F4 , 210MIPS ARM Micro – Controllor . It contains a hardware Floating Point Unit (FPU)
, Which is a huge advance for autopilots hobby class . OpenPilot was 32bit from day one , and the FPU represents another step on the scale of the performance . The FPU makes accurate and low-latency processing of measures real using advanced algorithms to calculation and evaluation
Flip32 F2 works perfectly with RACEFLIGHT – preloaded with RACEFIGHT or BetaFlight 3.0 ! Use the same and characteristics of CC3D REVO OpenPilot but with more functionality.
STM32F405 32BIT ARM CPU @ 168MHz
CC3D Revolution Targets –
Stable SPI MPU-6000 Gyro
BEC 1.5A – Direct Battery Connection
BlackBox Datalog 128MB 16MB FLASH
FLEXI-IO PORT JST-SH 10-pin. The receiver port can act as an input port or output depending on the configuration that is in hardware settings.
MAINPORT – JST – SH 4-pin . This is a standard USART whose transmission speed can be adjusted through the GCS . Optionally, the receiver Futaba S.Bus , satellite receiver Spektrum / JR or GPS can be mapped to the Mainport . Default Configuration it is telemetry for connection of a modem RF .
The configuration of the receiver port as an output port allows the user to assign multiple output channels standard servo outputs 6.
FLEXIPORT – JST – SH 4-pin . The function of this port depends also on the configuration and can be configured for I2C or serial . The default configuration does not use this port , but can be used for satellite receivers Telemetry , GPS , Spektrum ( all the operation ) , and other peripherals I2C ( under development ) .
The card OpenPilot Revo, Is a new generation of Flight Controller which uses the series STM32F4 , 210MIPS ARM Micro – Controllor . It contains a hardware Floating Point Unit (FPU)
, Which is a huge advance for autopilots hobby class . OpenPilot was 32bit from day one , and the FPU represents another step on the scale of the performance . The FPU makes accurate and low-latency processing of measures real using advanced algorithms to calculation and evaluation
. The Revo is a flight controller
with autopilot, intended to multirotori, helicopters and the wings fixed . It is a 6DOF with gyroscope / accelerometer
, Without magnetometer and without pressure sensors.
CleanFlight,BetaFlight,RaceFlight
STM32F405 CPU 32bit ARM @ 72MHz
CC3D Revolution Targets! – Pin headers
1.5A BEC – Direct Battery Connection
Low noise MPU6000 gyro Via SPI
Blackbox – Datalog 128Mb Flash (16Mb)
Spektrum satellite receiver port
No more external regulators
Bootloader Button
Built-in Micro-USB
30.5×30.5mm Holes ~5g
By harnessing the power and imagination of the open source community, OpenPilot have created a new generation of powerful, low cost flight controller known as CopterControl that is suitable for multirotors, helicopters and fixed wing aircraft.
The Open Pilot CC3D Revolution (Revo) is the result of 1000’s of hours of R&D work by the open source community, for the benefit of everyone and provides a robust base for commercial, research and hobby projects alike.
The Revo flight controller features state of the art hardware and software, backed by the Open Pilot GCS FC System and boasts position hold and 3D waypoint navigation among its many features. It is a full 10DOF with gyroscope, accelerometer, magnetometer and barometric pressure sensors.
The Revo uses the STM32F4 CPU which uses a hardware floating point unit (FPU,) that represents a huge advancement for hobby-class autopilots. This FPU allows precise, low-latency processing of real-life measurements using advanced attitude estimation algorithms.
In addition to an integral FPU, the STM32F405RGT6 chip has the ARM Cortex-M4 core at 210MIPS and saturation arithmetic DSP functions.
The CPU has a range of built-in hardware modules that can be programmed once and function independently, requiring little to no CPU overhead.
These include 14 multi-channel timers, 3 synchronous-sampling ADCs serving up to 24 channels, 2 DAC, matrix memory controller with 16-stream DMA.
Communication modules include USB2.0, 3 x I2C, 3 x SPI, 4 x USART, 2 x CAN and SIDO. All these modules can be configured for accessing the chip pins using a flexible switch matrix, or disabled to save power. USB connectivity ensures that software updates and settings are straightforward to make in the GCS (Ground Control Station.)
The flight controller features a built-in 433MHz OPLink Modem and uses the standard OpenPilot footprint so has the same dimensions and mounting holes as the OpenPilot CC, CC3D, GPS, OSD and PipX boards.
The Revo has an incredible array of functions to manage all of your flight parameters, and while it doesn’t have the kitchen sink, it does a real time hardware calendar if you ever feel the need for a wake up flight!
Features:
• Open source development
• Flexi-IO Port for input/output
• MainPort (Telemetry) serial USART w/adjustable baud rate.
• FlexiPort for telemetry funtions
• Power Sensor/Sonar Port
• STM32F4 32 bit CPU
• ARM32 powered digital packet processor
• USB2.0, I2C, SPI, USART, CAN and SIDO communication modules
• 14 Multi-channel timers
• 3-Axis gyro
• 3-Axis accelerometer
• PWM/PPM for configuration with Futaba, FrSky, Spektrum (inc satellite) receivers and many others.
FlexiPort

The Revo uses the same FlexiPort as the CC3D. The port can be used as either a UART or for I2C bus connectivity. It can be connected to serial devices like the OP GPS or any I2C device like the the EagleTree Airspeed expander module, ADCs, I2C ESCs and a lot more. It can also be used to connect Spektrum DSM2/DSMX Satellite to be used as receiver, or any other custom component interfacing with I2C or a serial connection including custom extension boards. Of course, it’s also possible to run a serial Telemetry link to the GCS over the FlexiPort.
Pinout
| Color | JST-SH Pin |
Voltage | Serial Function (GPS, Telemetry) |
I2C Function |
DSM |
|---|---|---|---|---|---|
| Black | 1 | GND | GND | GND | GND |
| Red | 2 | 4.8V – 15V |
PWR Out (VCC Unregulated) |
PWR Out (VCC Unregulated) |
PWR Out (VCC Unregulated) |
| Blue | 3 | 3.3V | TX | SCL | |
| Orange | 4 | 3.3V (5V Tolerant) |
RX | SDA | TX (Signal) |
Warning
The Spektrum adapter should only be powered by 3.3V, a step down adapter must be used.
Warning
The PWR Out voltage is dependent on the CC supplied voltage. Verify that you use the correct voltage for your S.BUS receiver.
MainPort
Standard serial port/S.Bus port (same as CC3D). This can be used to connect serial devices like Telemetry, OP GPS, Futaba S.Bus receivers or Spektrum DSM2/DSMX satellites (to be used as a receiver), freeing in these cases the Flexi-IO port for other uses. These systems use a single wire to help cut down cable clutter.
Pinout
| Color | JST-SH Pin |
Voltage | Serial Function (GPS, Telemetry) |
DSM | S.BUS |
|---|---|---|---|---|---|
| Black | 1 | GND | GND | GND | GND |
| Red | 2 | 4.8V – 15V |
PWR Out (VCC Unregulated) |
PWR Out (VCC Unregulated) |
PWR Out (VCC Unregulated) |
| Blue | 3 | 3.3V | TX | ||
| Orange | 4 | 3.3V (5V Tolerant) |
RX | TX (Signal) | TX (Signal) |
The Main Port (S.BUS)
The 4 pin main port is used as the Revolution‘s (Revo) serial port. You use this port to connect to your SBUS FrSky receiver. The pin-out of the cable is shown in the table below. You will most likely need to build the cable and the signal wire color can vary. It’s easy to do just pay attention to the pin-out and double check before powering up.

RaceFlight Receiver Config:
Connect your Revo to RaceFlight and configure it to use the SBUS receiver.


http://raceflightinfo.com/
Installing RaceFlight
How to install:
Using Raceflight Configurator, select the firmware_flasher tab and press the “Load firmware [Local]” button, you can now browse to the folder you downloaded the Raceflight firmware to & select the correct firmware.hex for your corresponding Flight Controller. Leaving all options unchecked ** (defaults) press “Flash firmware”. The Configuration tool should now erase the target and flash the selected firmware to your Flight controller. Depending on your flight controller, this may prompt the installation of DFU driver, you may see a windows popup for “installing new hardware”, if this happens allow it to complete and then press the “flash firmware” button again.
** Only exception to this being for the SPracingF3 flight controller, for this FC you will need to check ‘Manual buad rate’ and change the selection to ‘230400’ baud.
VCP / DFU boards under Windows:
If you don’t want to use the OP bootloader (recommended), make sure you have zadig if you’re using Windows. Instructions:
- Download Zadig: http://zadig.akeo.ie/
- Put device in DFU mode. If this is the first time to put RaceFlight on you need to short the BL or BOOT pads (or press and hold the BOOT tactile button) while plugging the USB into the board.
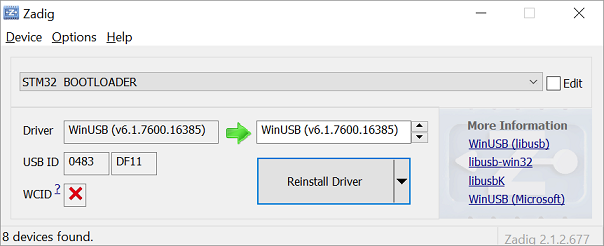
- Open Zadig.
- Options > List All Devices
- Click on the drop bown box and click the device listed STM32 BOOTLOADER

- In the box to the right of the green arrow, select WinUSB (v6.1.7600.16385)
- Click Install Driver
- After the install completes, restart your computer (you can cheat and ensure no browser is running – but it is not guaranteed to work). The board should stay in DFU mode – IF – usb power remains during the reboot. If not, execute step 2 again.
- Open up the raceflight configurator.
- Load Firmware [Local]
- Browse to and select the proper hex file. (raceflight_REVO.hex for the revo, for example)
- Click flash firmware.
- The board should start flashing. First indicating an erase, then flash and finally verification.
- Once flashed your board will reboot, but you may need to install the STM VCP driver (see below) for Raceflight Configurator to connect to the board.
Installing STMicro Virtual Com Port (VCP) Driver under Windows:
Many of the F4 boards (REVO, ALIENFLIGHTF4, BLUEJAYF4) utilise the STM32 Virtual Com Port (VCP). This allows the UARTs on board to be utilised whilst the USB is connected. This requires the STM VCP driver to be installed so that the VCP to be recognised as an additional comm port on the PC. NOTE: this is similar to installing a USB serial driver, e.g. FTDI or SiLabs
The STM32 VCP driver can be downloaded here -->http://www.st.com/web/en/catalog/tools/PF257938
NOTE: Once you download and run the installation it has not installed the driver, merely unpacked the choice of drivers. Locate the installation directory and then run the EXE file pertaining to your system.
e.g. C:Program Files (x86)STMicroelectronicsSoftwareVirtual comport driverWin8 <- will have two files present. One for 64 bit systems and one for 32 bit systems.
Connecting FrSky X4R SBUS Receiver to the Revolution (CC3D Revo) Flight Controller

The Main Port (S.BUS)
The 4 pin main port is used as the Revolution‘s (Revo) serial port. You use this port to connect to your SBUS FrSky receiver. The pin-out of the cable is shown in the table below. You will most likely need to build the cable and the signal wire color can vary. It’s easy to do just pay attention to the pin-out and double check before powering up.

Reviews (0)
Be the first to review “Flip32 F4 (Revo Pin Header edition) V2”
You must be logged in to post a review.
Related products

Reviews
There are no reviews yet.